Data Overview
File Structure
TreeScope/
└── <dataset>/
├── metadata/
│ ├── <dataset>.json
│ └── <dataset>-os-metadata.json
├── input/
│ ├── RAW-<dataset>M-01.bag
│ └── RAW-<dataset>U-01.bag
├── processed/
│ ├── <dataset>U-01.bag
│ ├── <dataset>U-02.bag
│ └── <dataset>M-01.bag
└── ground_truth/
├── labels/
│ ├── <dataset>U.h5
│ └── <dataset>M.h5
├── measurements/
│ ├── <dataset>M-gt.json
│ ├── <dataset>M-01-map.png
│ └── <dataset>M-02-map.png
├── pcds/
│ ├── <dataset>-01-tree11.pcd
│ ├── <dataset>-02-tree22.pcd
│ └── <dataset>-03-tree33.pcd
└── baseline/
├── <dataset>-DBCRE.yaml
└── <dataset>-SLOAM.yaml
Available <dataset> tags include:
- Forestry:
VAT-0723,VAT-1022,WSF-19 - Orchards:
UCM-0523,UCM-0323,UCM-0822
Metadata
<dataset>.json: Contains metadata descriptions for ROS bags and ground-truth data within this dataset<dataset>-os-metadata.json: Sensor metadata for the LiDAR model used in this dataset’s collection
Input
Input ROS bags contain raw data from all on-board sensors, including LiDAR, IMU, RGBD, GPS, and thermal camera data when available.
RAW-<dataset>M-##.bag: Raw data from all on-board sensors for the mobile sensor platformRAW-<dataset>U-##.bag: Raw data from all on-board sensors for the Falcon 4 UAV platform
Processed
Processed ROS bags which contain ground-truth lidar-intertial odometry and velocity-corrected point cloud frames for every sweep of the LiDAR provided by Faster-LIO. We also provide semantically inferred ground and tree point clouds in the sensor and robot base frame, from our trained segmentation network based on RangeNet++.
<dataset>U-##.bag: Each processed ROS bag contains the following rostopics:/Odometry: Ground-truth lidar-intertial odometry/cloud_registered_body: Velocity-corrected point cloud frames/os_node/segmented_point_cloud_no_destagger: Semantic inference cloud from our model based on RangeNet++/tree_cloudand/tree_cloud_world: Inferred tree stem clouds in sensor and robot base frames, respectively/ground_cloud: Inferred ground cloud/ublox/fixand/ublox/velocity: GPS data/tfand/tf_static: tf data
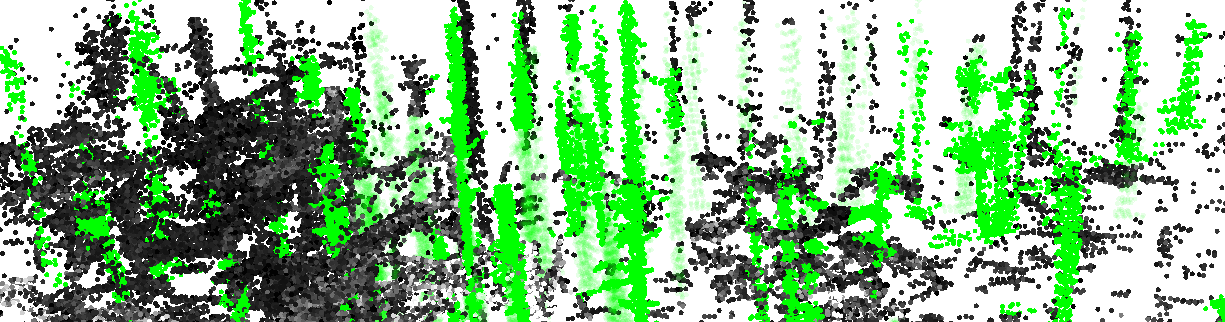
 Inferred point cloud visualization of
Inferred point cloud visualization of /os_node/segmented_point_cloud_no_destagger
Ground Truth
Labels
Manually annotated semantic labels for tree stems and ground points are provided for each data subset and model resolution platform. The labels are stored in HDF5 format, see our Github repo for instructions on how to convert them to numpy and 2D range image formats.
 Annotated semantic tree stem label visualization
Annotated semantic tree stem label visualization
Measurements
Field measurements (DBH provided for all, total tree heights and full diameter profiles provided for some trees) are stored in JSON files. The map PNG files show how the tree index names are correlated to trees in the JSON files and which ROS bags can be replayed to view the individual trees.
 JSON and map PNG files for VAT-0723M-01 ROS bag ground truth
JSON and map PNG files for VAT-0723M-01 ROS bag ground truth
Pointclouds
For each tree with a ground-truth field measurement, accumulated individual tree point clouds are provided as extracted by our segmentation models.
 |
 |
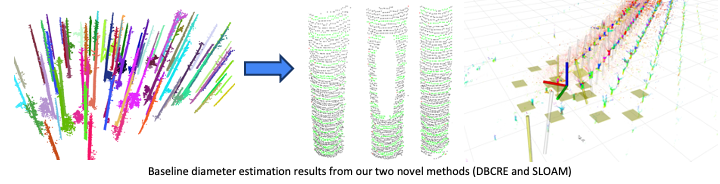
Individual tree point clouds are provided for diameter estimation algorithm testing
Baseline
We share YAML files with baseline diameter estimation results from our two novel methods (DBCRE and SLOAM). See our Github repo for instructions on how to use run the provided benchmark scripts to evaluate estimation results.